La mecatrónica nace a causa de la revolución industrial, que tuvo como consecuencia la creación de maquinas para el aumento en la calidad y cantidad de productos de uso consumo masivo, luego a mediados de los años cuarenta del siglo pasado la llamada así segunda revolución industrial que tuvo como característica relevante la creación del transistor semiconductor y la miniaturización de los componentes electrónicos acoplados en circuitos integrados, dio origen al computador digital. Este invento cambio totalmente el pensamiento de la sociedad y de la industria. En medio de estas dos épocas, los países que emplearon, pero en especial que produjeron estas nuevas tecnologías se pusieron a la cabeza o a la vanguardia de la sociedad.
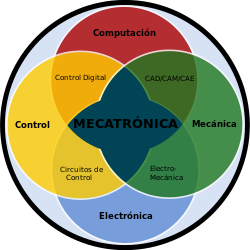
Pero el termino como tal fue acuñado en Japón a principios de los ochentas y comenzó a ser usado en Europa y Estados Unidos. Hoy en día la mecatrónica es un término que une distintas tecnologías como la mecánica, electrónica, programación de computadores, etc. La Mecatrónica surge de la combinación sinérgica de distintas ramas de la Ingeniería, entre las que destacan: la Mecánica de precisión, la Electrónica, La Informática y los Sistemas de Control. Su principal propósito es el análisis y diseño de productos y de procesos de manufactura automatizados. El término “Mecatrónica” fue introducido por primera vez en 1969 por el Ingeniero Tetsuro Mori, trabajador de la empresa japonesa Yaskawa. En un principio se definió como la integración de la mecánica y la electrónica en una máquina o producto, pero luego se consolidó como una especialidad de la ingeniería e incorporó otros elementos como los sistemas de computación, los desarrollos de la microelectrónica, la inteligencia artificial, la teoría de control y otros relacionados con la informática. La definición de mecatrónica propuesta por J.A. Rietdijk es: “Mecatrónica es la combinación sinérgica de la ingeniería mecánica de precisión, de la electrónica, del control automático y de los sistemas para el diseño de productos y procesos”.
La integración de la ingeniería electrónica, la ingeniería eléctrica, la tecnología de cómputo y la ingeniería de control o la ingeniería mecánica es cada vez mas frecuente en el diseño, fabricación y mantenimiento de una vasta gama de productos y procesos de ingeniería. Lo anterior trae consigo la necesidad de que ingenieros y técnicos adopten un enfoque interdisciplinario e integrado en la ingeniería.
Con el nombre de mecatrónica se designa a este enfoque integrado. Consecuencia de lo anterior es la necesidad de que ingenieros y técnicos dispongan de habilidades y conocimientos que no se especialicen solo en un área. Es necesario que tengan la capacidad para desenvolverse y comunicarse a través de toda una diversidad de disciplinas de la ingeniería, así como de vincularse con otras personas que cuentan con destrezas y conocimientos mas especializados.
La integración de las áreas de ingeniería trae consigo la necesidad de que ingenieros y técnicos adopten un enfoque interdisciplinario e integrado en la ingeniería.
Los ingenieros en mecatrónica deben tener la capacidad para desenvolverse y comunicarse a través de toda una diversidad de disciplinas de la ingeniería, así como de vincularse con otras personas que cuenten con destrezas y conocimientos mas especializados.
El perfil de ingreso que tiene que tener un ingeniero en mecatrónica es capacidad inventiva y originalidad, habilidad para el cálculo matemático, habilidad para captar relaciones espaciales, mecánicas y visión de conjunto, alto sentido de organización, alta capacidad de análisis, adaptabilidad social, sentido de autoridad y colaboración.
El ingeniero mecatrónico se distingue por su capacidad inventiva y su originalidad, además de su habilidad para dirigir equipos interdisciplinarios de trabajo, posee actitud emprendedora y de liderazgo, y se adopta con creatividad a los cambios que tengan lugar.
El acelerado desarrollo tecnológico en el mundo ah provocado que desde los aparatos de uso cotidiano hasta los más modernos robots, estén compuestos por dispositivos que utilizan mecanismos precisos, controlados por sistemas electrónicos y computarizados.
Loa anterior le permite al ingeniero mecatrónico desarrollarse en industrias como la automotriz, la aeronáutica, la biotecnología, las telecomunicaciones, la robótica, la electrónica y los sistemas informáticos, entre otras.
Así, el campo de acción del ingeniero en mecatrónica comprende tanto los aspectos relacionados con la mecánica de precisión como los sistemas de control electrónico y la tecnología informática. Los conocimientos del ingeniero mecatrónico lo hacen capaz de diseñar un sinnúmero de sistemas y equipos, desde componentes para computadoras y periféricos, sistemas de navegación para automóviles, automatización de líneas de producción, proyectos para edificios inteligentes, dispositivos de apoyo para personas con capacidades diferentes y cualquier sistema que permita mejorar la calidad de vida del ser humano.
La mecatrónica trabaja con lo que se conoce como sistemas. un sistema puede concebirse como una caja con una entrada y una salida y de la cual no nos interesa su contenido, sino la relación que existe entre la salida y la entrada.
Un sistema de medición se podría considerar como una caja negra que se utiliza para medir. Su entrada es la magnitud que se desea medir y su salida es el valor correspondiente a esa magnitud. En el caso de un sistema de medición de temperatura, como un termómetro, la entrada es la temperatura y la salida es un número que aparece en una escala. Un sistema de control puede considerarse como una caja negra que sirve para controlar la salida de un valor o secuencia de valores determinados.
En general, puede decirse que los sistemas de medición están formados por tres elementos:
Un sensor, el cual responde a la cantidad que se mide, dando como salida una señal relacionada con dicha cantidad.
Un acondicionador de señal, el cual toma la señal del sensor y la manipula para convertirla a una forma adecuada para su presentación visual o, como en el caso de un sistema de control, para que ejerza una acción de control.
Un sistema de presentación visual (pantalla o display), es donde se despliega la salida producida por el acondicionador de señal.
En un control por retroalimentación el sistema de control compara la salida real retroalimentada con el valor que se requiere y ajusta su salida de acuerdo con el resultado.
Existen dos tipos básicos de sistema de control: el de lazo abierto y el de lazo cerrado. En el sistema de lazo abierto no hay retroalimentación. En un sistema de lazo cerrado la salida tiene efecto en la señal de entrada, modificándola para mantener la señal de salida en el valor requerido.
Los sistemas de lazo abierto con frecuencia son imprecisos ya que no hay correcciones de errores. Los sistemas de lazo cerrado tienen la ventaja de ser bastantes precisos para igualar el valor real y deseado.
El término control secuencial se usa cuando las acciones de control están ordenadas estrictamente de acuerdo con una secuencia definida por el tiempo o por los eventos.
Un control como el anterior se obtiene mediante un circuito eléctrico que cuenta con grupos de relevadores o de interruptores operados por levas, las cuales se conectan de manera que se produzca la secuencia deseada. Un ejemplo de un dispositivo de control secuencial serían las lavadoras de ropa.
Cuando a un devanado se le aplica a una corriente se crea un campo magnético. Si próximo a este campo se encuentra un objeto metálico, en él me inducen corrientes de Foucault o parásitas. Estas corrientes parásitas a su vez generan campos magnéticos que afectan al campo magnético que lo origina.
Interruptor de proximidad inductivo
Este sensor esta formado por un devanado enrollado en un núcleo. Al aproximar el extremo del devanado a un objeto metálico, cambia la inductancia del primero. Este cambio puede monitorearse por el efecto que produce en un circuito resonante y sirve para activar un interruptor.
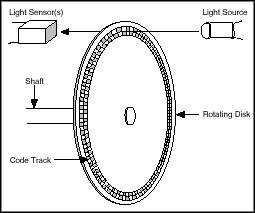
Codificadores ópticos
Un codificador es un dispositivo que produce una salida digital como resultado de un desplazamiento lineal o angular. Los codificadores de posición se clasifican en dos categorías: codificadores de incremento, los cuales detectan los cambios en la rotación a partir de una posición de datos y codificadores absolutos, que proporcionan la posición angular real.
Un haz luminoso al atravesar las ranuras de un disco, es detectado por un sensor de luz, Cuando el disco gira, el sensor produce una salida de forma de pulsos; la cantidad de pulsos es proporcional al angulo que gira el disco.
Sensores neumáticos
Los sensores neumáticos utilizan aire comprimido, y el desplazamiento o la proximidad de un objeto se transforma en un cambio en la presión del aire.
Un puerto en el frente del sensor deja salir aire a baja presión. Este aire, en ausencia de un objeto cercano, escapa y al hacerlo reduce la presión en el puerto de salida del sensor. Sin embargo, si hay un objeto cerca, el aire no escapa con facilidad y la presión aumenta en el puerto de salida.
Interruptores de proximidad
Existen diversas modalidades de interruptores que se activan por la presencia de un objeto y sirve como sensor de proximidad.
Un microinterruptor es un pequeño interruptor eléctrico que requiere un contacto físico y una fuerza de acción para cerrar los contactos.
Un interruptor de lengüeta consta de dos contactos de un interruptor magnético que están en un tubo de vidrio. Cuando un imán se aproxima al interruptor, las lengüetas magnéticas se atraen y cierran así los contactos del interruptor.
Los dispositivos fotosensibles se usan para detectar la presencia de un objeto opaco al interponerse éste entre el haz luminoso y el dispositivo.
Tacogenerador
El tacogenerador sirve para medir la velocidad angular. Una de sus modalidades es el tacogenerador de reluctancia variable, el cual está formado por una rueda dentada de material ferromagnético unida a un eje giratorio. En un imán permanente se enrolla un devanado de captación; conforme gira la rueda, los dientes pasan por la bobina y el volumen de aire entre bobina y material ferromagnético varia. Se tiene un circuito magnético con un espacio de aire que cambia de manera periódica.
Sensores piroeléctricos
Los sensores piroeléctricos están formado por un cristal piroeléctrico polarizado cuyas caras tienen delgadas capas de metal como electrodos. Dado que el cristal está polarizado con superficies cargadas, los iones son atraídos por el aire que los rodea y por los electrones del circuito de medición conectado al sensor para equilibrar la carga superficial. El sensor piroeléctrico genera una carga cuando hay un cambio en su temperatura debido a la incidencia de radiación infrarroja.
Para detectar el movimiento de un ser humano o de otra fuente calorífica, el elemento sensor debe diferenciar entre la radiación calorífica general del ambiente y la que produce la fuente en movimiento. Lo anterior no se puede lograr con un solo sensor piroelectrico y por ello se utiliza un sensor piroeléctrico doble.
Indicador de presiones con deformímetro
Una modalidad muy común de transductor para medir fuerza se basa en el empleo de deformímetros de resistencia eléctrica para monitorear la deformación de cierto elemento cuando éste se estira, comprime o dobla por la aplicación de una fuerza. A este transductor se le conoce como indicador de presiones. Al aplicar fuerzas para comprimir el cilindro, los deformímetros producen un cambio de resistencia, el cual es la medida de la deformación y, por lo tanto, de las fuerzas aplicadas.
Sensores piezoelétricos
Cuando un material piezoeléctrico se estira o comprime genera cargas eléctricas; una de sus caras se carga en forma positiva y la cara opuesta en forma negativa. En consecuencia, se produce un voltaje. Los materiales piezoeléctricos son cristales iónicos que al estirarlos o comprimirlos producen una distribución de carga en el cristal que origina un desplazamiento neto de carga; una de las caras del material se carga positivamente y la otra negativamente.
Los sensores piezoeléctricos se usan para medir presión, fuerza y aceleración.
Sensor táctil
El sensor táctil o de tacto es una forma particular de sensor de presión. En una modalidad de sensor táctil se utiliza una capa de fluoruro de polivinilideno piezoeléctrico (PVDF). Se usan dos capas de la película separadas con una capa suave que transmite vibraciones. A la capa inferior de PVDF se le aplica un voltaje alterno que produce oscilaciones mecánicas en la película. La película intermedia transmite estas vibraciones a la capa superior.. Debido al efecto piezoeléctrico, estas vibraciones producen un voltaje alterno a través de la película superior.
Placa de orificio
La placa de orificio es un disco con un orificio en el centro que se coloca en un tubo a través del cual fluye un líquido. Se mide la diferencia de presiones entre un punto igual al diámetro del tubo corriente arriba y un punto igual a la mitad del diámetro corriente abajo.
Medidor de turbina
El medidor de flujo de turbina consta de un rotor con varios álaves y se coloca en medio de la tubería del flujo que interesa. Al fluir, el líquido hace que gire el rotor, y la velocidad angular es casi proporcional al gasto. El rango de velocidad del rotor se determina mediante un captador magnético.
Presión diferencial
La celda de presión diferencial determina la diferencia de presión entre el líquido que está en la base del recipiente y la presión atmosférica, suponiendo que el recipiente está abierto y recibe la presión atmosférica.
La señal de salida del sensor de un sistema de medición en general se debe procesar de una forma adecuada para la siguiente etapa de la operación. La señal puede ser, por ejemplo, demasiado pequeña y sería necesario amplificarla; ser analógica y requerir su digitalización; ser digital y convertirla en analógica. A todas estas modificaciones se les designa en general con el término acondicionamiento de señal.
Procesos de acondicionamiento de señales
Protección para evitar daño al siguiente elemento, por ejemplo, un microprocesador como consecuencia de un voltaje o una corriente elevados.
convertir una señal en un tipo de señal adecuada. Sería el caso cuando es necesario convertir una señal a un voltaje de cd o a una corriente.
Obtención del nivel adecuado de la señal.
Eliminación o reducción del ruido. Por ejemplo, para eliminar el ruido en una señal se utilizan filtros.
Manipulación de la señal, por ejemplo, convertir una variable en una función lineal.
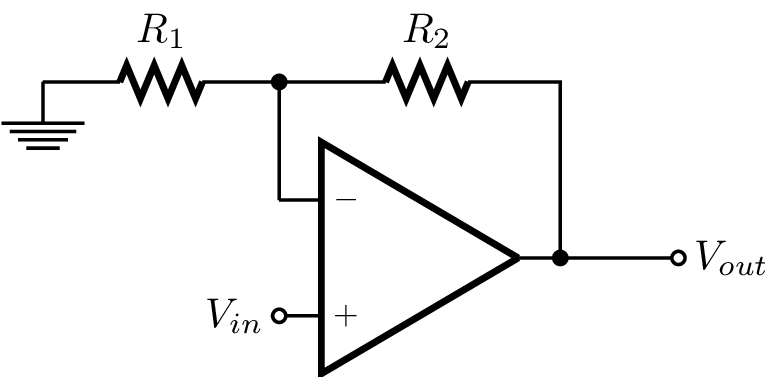
Amplificador operacional
El fundamento de numeroso módulos para acondicionamiento de señal es un amplificador operacional. Este es un amplificador de alta ganancia de cd, en general de 100,000 o más, y está disponible como circuito integrado en chips de silicio. Tiene dos entradas: entrada inversora (-) y entrada no inversora (+).
Amplificador inversor
En la anterior figura se muestran conexiones de un amplificador cuando se usa un amplificador inversor. La entrada se lleva a la entrada inversora a través de la resistencia R1 en tanto que la entrada no inversora se conecta a tierra. Se establece una trayectoria de retroalimentación que inicia en la salida, pasa por la resistencia R2 y llega a la entrada inversora.
Amplificador no inversor
La figura anterior muestra el amplificador operacional conectado como amplificador no inversor. La salida se puede considerar como tomada de un circuito devisor de voltaje formado por una resistencia R1 conectada en serie con R2.
Filtrado
El término filtrado se refiere al proceso de eliminación de cierta banda de frecuencias de una señal y permite que otras se transmitan. El rango de frecuencias que pasa un filtro se conoce como banda de paso, y el que no pasa como banda de supresión; la frontera entre lo que se suprime y lo que se pasa se conoce como frecuencia de corte.
Los filtros se clasifican de acuerdo con los rangos de frecuencia que transmiten o rechazan. Un filtro pasa bajas tiene un pasa bandas que acepta la transmisión de todas las frecuencia desde 0 hasta cierto valor.
El filtro pasa altas tiene una pasa banda que permite la transmisión de todas las frecuencias a partir de un determinado valor hasta un valor infinito.
El filtro supresor de banda rechaza e impide la transmisión de todas las frecuencias de cierta banda.
El filtro pasa bandas permite la transmisión de todas las frecuencias que están dentro de una banda especificada.
Señales digitales
La salida que producen la mayoría de los sensores en general es de tipo analógica. Cuando un microprocesador forma parte del sistema de medición o de control, es necesario convertir la salida analógica del sensor a una forma digital antes de alimentarla al microprocesador.
Conversión de señales analógicas a digitales
La conversión de señales analógicas a digitales implica la conversión de las primeras a palabras binarias.
El procedimiento utilizado es un temporizador que proporciona al convertidor analógico a digital (CAD) impulsos de señal de duración regular y cada vez que éste recibe un impulso muestra la señal analógica. Después se utiliza una unidad de muestreo y retención para retener cada uno de los valores muestreados hasta que se produzca el siguiente impulso.
Conversión de señal digital a analógica
La entrada de un convertidor digital a analógico (CDA) es una palabra binaria; la salida es una señal analógica que representa la suma ponderada de los bits que no son cero representados en la palabra. Por ejemplo, una entrada 0010 produce una salida analógica que es el doble de lo que se obtiene con una entrada de 001.
Al estudiar los
sistemas eléctricos que se emplean como actuadores de control deberán tenerse
en cuenta los siguientes dispositivos y sistemas:
1.- Dispositivos
de comunicación, como son los interruptores mecánicos (relevadores) y los
interruptores de estado solido (diodos, tristores y transistores), en los que
la señal de control enciende o apaga un dispositivo eléctrico.
2.- Dispositivos
tipo solenoide, en los cuales una corriente que pasa por un solenoide acciona
un núcleo de hierro dulce, por ejemplo una válvula hidráulica/neumática operada
por solenoide.
3.- Sistemas motrices, por ejemplo, motores de cd y de ca, en los cuales la corriente que pasa por el motor produce una rotación.
Interruptores mecánicos
Los interruptores mecánicos son los elementos que con frecuencia se usan como sensores para producir y enviar entradas a diversos sistemas, por ejemplo, un teclado. El relevador eléctrico es un ejemplo de interruptor mecánico que en los sistemas de control se usa como actuador.
Relevadores
El relevador eléctrico responde a las señales de control mediante una sencilla acción de conmutación de encendido/apagado. Al circular una corriente por un embobinado de alambre se produce un campo magnético y atrae un brazo movible, que es la armadura, la cual produce la apertura o cierre de los contactos.
Por lo general hay dos juegos de contactos, uno que se cierra y otro que se abre debido a la acción que produce el campo magnético producido por el embobinado. Esta acción se aprovecha para transmitir corriente a un motor o a un calentador eléctrico de un sistema de control de temperatura.
interruptores de estado sólido
Para realizar la conmutación electrónica de los circuitos se utilizan diversos dispositivos de estado sólido. Entre estos figuran los siguientes:
1.- Diodos
2.- Tristores y triacs
3.- Transistores bipolares
4.- MOSFETs de potencia
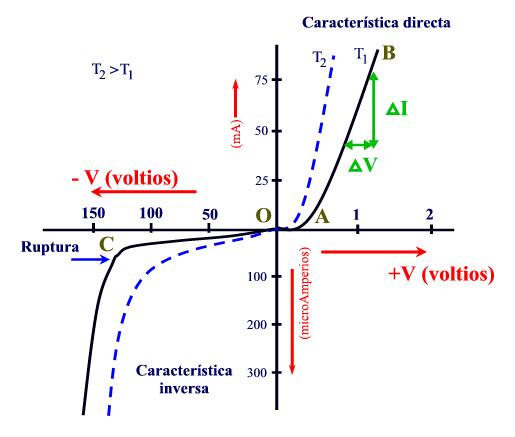
Diodos
El diodo permite el paso de una cantidad significativa de corriente sólo en una dirección. El diodo se considera como un elemento direccional que permite el paso de corriente sólo cuando se polarización es directa, es decir, si el ánodo es positivo respecto al cátodo.
Tristores y triacs
El tristor o rectificador controlado por silicio es un diodo con una compuerta que controla las condiciones en los que se activa. Si la corriente en la compuerta es cero y la polarización del tristor es inversa, por éste pasa una corriente despreciable. Si el tristor tiene polarización directa, la corriente también es despreciable, hasta que se rebasa el voltaje de ruptura.
el triac (tristor bidireccional) es similar al tristor y equivale a un par de tristores conectados en forma inversa y en paralelo al mismo chip. El triac se activa tanto en sentido directo como en sentido inverso. Un ejemplo es el triac MAC212-4 de Motorola, que tiene un voltaje máximo sin riesgo de disparo de 200 V y una corriente máxima en condiciones de trabajos de 12 A.
Transistores bipolares
Existen dos tipos de transistores bipolares: el "npn" y el "pnp". En el transistor "npn" la corriente principal entra por el colector y sale por el emisor y en la base se aplica una señal de control. En el transistor "pnp" la corriente principal entra por el emisor y sale por el colector y en la base se aplica una señal de control.
MOSFETs
Hay dos tipos de MOSFETs (transistores de efecto de campo de semiconductor de óxido metálico, por sus siglas en inglés): de cal "n" y de canal "p".
La principal diferencia en el uso de un MOSFET para conmutación y un transistor bipolar para el mismo propósito es que no entra corriente a la compuerta para lograr dicho control.
Solenoides
Los solenoides se pueden usar como actuadores operados eléctricamente. Las válvulas de solenoide son un ejemplo de estos dispositivos y se utilizan para controlar el flujo de fluidos en sistemas hidráulicos y neumáticos.
Motores de CD
Los motores eléctricos con frecuencia se emplean como elemento de control final en los sistemas de control por posición o de velocidad. los motores se pueden clasificar en dos categorías principales: motores de cd y motores de ca.
Los principios básicos del funcionamiento de motor son los siguientes:
1.- Cuando en un campo magnético, una corriente pasa por un conductor se ejerce una fuerza sobre el conductor. Para un conductor de longitud (L) que lleva una corriente (I) en un campo magnético que tiene la densidad de flujo (B) y es perpendicular, la fuerza ejercida (F) es igual a BIL.
2.- Cuando un conductor se desplaza dentro de una campo magnético sobre el se induce una f.e.m. La f.e.m. inducida (e) es igual a la velocidad con la que cambia el flujo magnético que cubre al conductor (Ley de Faraday).
Motores de CA
Los motores de corriente alterna se pueden clasificar en dos grupos: monofásicos y polifásicos, cada uno de los cuales se subdivide en motores de inducción y motores sincronos. Existe la tendencia a usar motores monofásicos si la potencia requerida es baja, en tanto los polifásicos se emplean cuando se requiere mucha potencia. Los motores de inducción en general son mas baratos que los sincronos.
El motor de inducción de una fase y jaula de ardilla consta de un tipo de jaula de ardilla, es decir, barras de cobre o aluminio insertadas en las ranuras de los aros de las extremidades para formar circuitos eléctricoscompletos.
El motor de inducción trifásico es similar al motor de inducción de una fase, sólo que tiene un estator con tres devanados separados 120º cada uno conectado a una de las tres líneas de alimentación eléctrica.
Sistemas de actuación mecánica
Sistemas mecánicos
Este capítulo habla sobre los mecanismos, es decir, dispositivos que se pueden considerar convertidores de movimiento, en tanto transforman el movimiento de una forma a otra.
Por ejemplo, con un mecanismo, un movimiento lineal se puede puede convertir en un movimiento rotacional.
Entre los elementos mecánicos están los mecanismos de barras articuladas, levas, engranes, cremalleras, cadenas, correas de transmisión, etc.
Tipos de movimiento
El movimiento de un cuerpo rígido puede ser muy complejo y su descripción resulta difícil. Sin embargo, el movimiento de un cuerpo rígido se puede considerar como la combinación de movimientos de traslación y rotación. Considerando tres dimensiones espaciales, el movimiento de traslación sería un movimiento que se divide en componentes que coinciden con uno o mas de los tres ejes. Una rotación puede ser una rotación con componentes que giran alrededor de uno o mas ejes. Los movimientos complejos pueden ser una combinación de movimientos de traslación y rotación.
Cadenas cinemáticas
Cada una de las partes del mecanismo que se mueve en relación con otras se denomina articulación. Esto no tiene por fuerza que ser un cuerpo rígido, basta que sea un cuerpo resistente capaz de transmitir la fuerza requerida sufriendo una deformación despreciable. Por este motivo, en general se le representa como un cuerpo rígido con dos o mas puntos de unión con otras articulaciones y a las cuales se denomina nodos. Una pieza de enlace es una conexión de dos o más articulaciones en sus nodos, la cual permite que haya cierto movimiento entre las articulaciones conectadas.
Al conjunto de piezas de eslabonamiento y de articulaciones se conoce como cadena cinemática. Para que una cadena cinemática transmita movimiento una articulación debe de estar fija.
Un ejemplo de cadena cinemática es el motor de un automóvil en el cual el movimiento alterno de un pistón se transforma en el movimiento rotacional de un eje montado en un sistema articulado fijo.
Levas
Una leva es un cuerpo que gira y oscila y, al hacerlo, transmite un movimiento alterno u oscilatorio a un segundo cuerpo conocido como seguidor, con el cual esta en contacto. Al girar la leva el seguidor sube, se detiene y desciende; los lapsos correspondientes a estos pasos dependerán de la forma de la leva.
La sección de elevación de la leva provoca el ascendo del seguidor y de su perfil. La sección de descenso de la leva, el descenso del seguidor y de su perfil dependerá de que tan rápido desciende el seguidor de la leva. La sección de detención de la leva provoca que el seguidor permanezca en un mismo nivel durante un tiempo considerable.
Trenes de engranes
Los trenes de engranes son mecanismos muy utilizados para transferir y transformar el movimiento rotacional. Se emplean cuando es necesario obtener un cambio en la velocidad, o el par de rotación de un dispositivo que está girando. Por ejemplo, la caja de velocidades de un auto permite al conductor igualar la velocidad y par de rotación necesarios para determinada superficie con la potencia del motor posible.
El movimiento rotacional se transfiere de un eje a otro mediante u par de cilindros giratorios; sin embargo, existe las posibilidad de que haya desplazamiento o derrape. La transferencia de movimiento entre dos cilindros depende de la fuerza de fricción entre las dos superficies en contacto. Para evitar el deslizamiento de los cilindros se añaden dientes de engranaje, con lo que se obtiene un par de engranes endentados.
Sistemas de actuación neumática e hidráulica
Sistemas de actuadores
Los sistemas de actuadores son los elementos de los sistemas de control que transforman la salida de un microprocesador o un sistema de control en una acción de control para una máquina o dispositivo. Por ejemplo, si es necesario transformar una salida eléctrica del controlador en un movimiento lineal que realiza el desplazamiento de una carga.
Sistemas neumáticos e hidráulicos
Con frecuencia las señales neumáticas son utilizadas para controlar elementos de actuación final, incluso cuando el sistema de control es eléctrico. Esto se debe a que con dichas señales es posible accionar válvulas de grandes dimensiones y otros dispositivos de control que requieren mucha potencia para mover grandes cargas.
Las señales hidráulicas se usan en dispositivos de control de mucha mayor potencia; sin embargo son mas costosos y conllevan mucho riesgo.
Fuentes de energía
En un sistema hidráulico la presurización del aceite se logra mediante una bomba accionada por un motor eléctrico. La bomba envía aceite al sistema desde un pozo colector a través de una válvula de retención y un acumulador. La válvula de alivio libera presión cuando ésta rebasa determinado nivel de seguridad; la válvula de retención evita que el aceite regrese a la bomba y el acumulador equilibra las fluctuaciones de corta duración e la presión de salida del aceite. En esencia el acumulador es un recipiente que mantiene el aceite bajo presión, soportando una fuerza externa.
Válvulas para control de dirección
En los sistemas neumáticos e hidráulicos se utilizan válvulas de control de dirección para controlar el sentido de flujo de un fluido que pasa por un sistema. Su función no es modificar el gasto de un fluido, pero son dispositivos abiertos o cerrados por completo. Estas válvulas se utilizan con frecuencia en el diseño de sistemas de control de secuencia y se activan para cambiar la dirección de flujo en un fluido.
Un tipo muy común de válvula de control de dirección es la válvula de carrete. Dentro del cuerpo de la válvula se desplaza un carrete en forma horizontal para controlar el flujo. Las válvulas giratorias de carrete tienen un carrete giratorio que al girar abre y cierra los puertos. Otra modalidad muy común de válvula de control direccional es la válvula de vástago.
Símbolos de válvula
Las diferentes posiciones de conexión de las válvulas de control se representan mediante un cuadrado. Las flechas indican la dirección de flujo en cada una de las posiciones, las líneas co tope corresponden a líneas de flujo cerrado.
Válvulas operadas con pilotaje
La fuerza necesaria para desplazar la válvula en ocasiones es demasiado grande para hacerlo de manera manual. Para solucionar ese problema se utiliza un sistema accionado con pilotaje, el cual usa una válvula para controlar una segunda válvula. La capacidad de la válvula piloto es pequeña y se acciona en forma manual o mediante solenoide.
Válvulas direccionales
Las válvulas direccionales se usan para regular el flujo de lubricante; por ejemplo, para dividir un sistema de lubricación centralizada en dos o más circuitos de lubricación (control de canal) y para alternar entre zonas de lubricación por circulación e intermitente.
Válvulas de control de presión
Existen varios tipos de válvulas de control de presión:
Válvulas para regulación de presión: sirven para controlar la presión de operación en un circuito y mantenerla en un valor constante.
Válvulas limitadoras de presión: se usan para dispositivos de seguridad para limitar la presión en un circuito y mantenerlo en un valor inferior al de seguridad.
válvulas de secuencia de presión: estas válvulas se usan para detectar la presión de una línea externa y producir una señal cuando se alcanza un valor determinado.
Para estudiar el comportamiento
de los sistemas se utilizan modelos matemáticos, que se representan por
ecuaciones, las cuales describen las relaciones entre la entrada y salida de un
sistema, y que también se aprovechan para predecir el comportamiento de un
sistema en condiciones especificas. Las bases de estos modelos se obtienen de
leyes físicas fundamentales que rigen el comportamiento de un sistema.
Elementos básicos de
sistemas mecánicos
Los elementos básicos que se
utilizan para representar sistemas mecánicos son los resortes, amortiguadores y
masas. Los resortes representan la rigidez del sistema; los amortiguadores, las
fuerzas que se oponen al movimiento, es decir, los efectos de fricción, y las
masas, la inercia o resistencia de la aceleración.
La rigidez de un resorte se
describe por la relación entra la fuerza (f), que se usa para extender o
comprimir dicho resorte y la extensión o compresión (x) resultante. Un resorte
lineal se describe como:
F=kx
El elemento básico
amortiguador representa el tipo de fuerzas que se originan cuando se intenta
empujar un objeto a través de un fluido, o al desplazar un objeto en contra de
fuerzas de fricción. El amortiguador se representa por un pistón que se mueve
en un cilindro cerrado. Para que el pistón se mueva es necesario que el fluido
de uno de los lados del pistón fluya a través, o hacia delante, de este. Esto
produce una fuerza resistiva. En el caso ideal, la fuerza de amortiguamiento o
resistiva (f) es proporcional a la de amortiguamiento o resistiva. En el caso
ideal, la fuerza de amortiguamiento o resistiva (f) es proporcional a la
velocidad (v) con la que se mueve el pistón, es decir:
F=cv donde "c" es constante
El elemento básico masa
tiene la propiedad de que cuanto mayor sea la masa, mayor será la fuerza
necesaria para acelerarla. La relación entre la fuerza (f) y la aceleración (a)
es F=ma (segunda ley de Newton), donde la constante de proporcionalidad entre
la fuerza y la aceleración es la constante denominada masa (m). Tenemos que:
F=ma = m dv/dt = m d2x/dt2
Sistemas rotacionales
Los elementos básicos en los
sistemas rotacionales son el resorte de torsión, el amortiguador giratorio y el
momento de inercia, es decir, la inercia de una masa con movimiento giratorio.
Con un resorte de torsión,
el desplazamiento angular (θ) es proporcional al toque (T), por lo tanto:
T= k θ
En el amortiguador giratorio
un disco gira dentro de un fluido y el toque resisitivo (T) es proporcional a
la velocidad angular (w), y dado que la velocidad angular es igual a la razón
de cambio del ángulo, es decir, dθ l dt.
T=wc= c dθ/dt
El elemento
básico momento de inercia tiene la propiedad de mientras mas grande sea el
momento de inercia (I), mayor será el tanque requerido para producir una aceleración
angular, (a):
T= Ia
Tomando en
cuenta que la aceleración angular es igual a la razón de cambio de la velocidad
angular, es decir dw/dt y la velocidad angular es igual a la razón de cambio
del desplazamiento angular, entonces:
T= I dw/dt = I d(dθdt)/dt = I d2θ/dt2
Elementos
básicos de sistemas eléctricos
Los elementos
básicos de los sistemas eléctricos son los inductores, capacitores y
resistencias. En un inductor la diferencia de potencial (v) presente en todo
momento depende de la razón de cambio de la corriente (di/dt) que pasa por él
es decir:
v= L di/dt
donde (L) es la
inductancia.
En un
capacitador, la diferencia de potencial depende de la carga (q), de las placas
del capacitor en determinado momento
v= q/C
donde (C) es la
capacitancia.
Dado que v=q/C,
entonces:
dv/dt = I/C dq/dt = I/C i
En una
resistencia, la diferencia de potencial (v), en un instante dado dependerá de
la corriente (i), que circule por ella, es decir:
v= Ri
donde (R) es la
resistencia.
La potencia (P)
que disipa una resistencia cuando tiene una diferencia de potencial (v) es:
P= iv = v2/R
Elementos
básicos en sistemas fluidos
En los sistemas
de fluidos hay tres elementos básicos que se pueden considerar los equivalentes
de la resistencia eléctrica, la capacitancia y la inductancia. Se puede
considerar que los sistemas de fluidos pertenecen a dos categorías:
hidráulicos, donde el fluido es un liquido no compresible; y neumáticos los
cuales contienen gases compresible que, por lo tanto, experimentan cambios de
densidad.
La resistencia
hidráulica es la que se presenta un liquido cuando fluye a través de una
valvula o debido a los cambios en el diámetro de la tubería. La relación entre
el gasto volumétrico de un liquido (q), que pasa por un elemento de
resistencia, y la diferencia de presión resultante, (p1 – p2)
es:
p1
– p2 = Ra
donde (R) es una
constante denominada resistencia hidráulica.
Capacitancia
hidráulica es el termino que describe la energía almacenada en un liquido
cuando éste se almacena en forma de energía potencial, es decir, lo que se
conoce como carga de agua.
q1 – q2 = dV/dt
La inercia
hidráulica es el equivalente de la inductancia en un sistema eléctrico o de un
resorte en los sistemas mecánicos. Por acelerar un fluido y así aumentar su
velocidad, se requiere una fuerza. Considere un bloque de masa liquida (m). La
fuerza neta que actúa sobre el liquido es:
F1 – F2 = p1A
– p2A = (p1 – p2) A
Después de una
serie de conversiones llegamos a la ecuación final:












.jpg/220px-TRIAC_(smial).jpg)